Cerchiamo di comprendere il funzionamento degli scanner itraorali o da laboratorio e perche le cose non sempre vanno come vorremmo.
Guarda il video o leggi il post.
Oggi nei laboratori odontotecnici , e in sempre piu’ studi dentistici si utilizza una tecnologia , la scansione tridimensionale , che purtroppo è ancor poco conosciuta dalla maggior parte dei possessori.
Esistono diverse tecnologie di acquisizione tridimensionale nel settore dentale , quella maggiormente utilizzata è la scansione ottica a luce strutturata.
Questa tecnologia utilizza la capacita di telecamere che riescono a leggere e interpretare la deformazione che riferimenti geometrici noti , come per esempio delle linee di luce e ombra, hanno una volta proiettati su degli oggetti fisici.
I vantaggi di questa tecnologia sono: Velocità’ di acquisizione, capacita’ di leggere materiali differenti e precisione si contrappongono ai contro come la sensibilita’ alle condizioni di illuminazione ambientale.
Troppa luce nell’ambiente o troppa oscurità’ possono creare distorsioni ed errori nella lettura delle geometrie proiettate.

Abbiamo detto che le telecamere degli scanner devono “leggere” le deformazioni che linee di luce e ombra hanno sull’oggetto da scansione.
Tutti gli oggetti quando colpiti da luce restituiscono all’osservatore, in questo caso la telecamera , parte della luce.
Questo fenomeno , simile allo Scatering che osserviamo sulle TAC o sulle CBCT , tende a sfumare i contorni, sovradimensionando, agli occhi dell’osservatore, l’oggetto.
La telecamera commettera’ quindi un piccolo errore di sovradimensionamento dell’oggetto osservato; errore dovuto alla impossibilita’ di vedere nitidamente i contorni mascherati dalla luce riflessa o emessa.
La telcamera, e quindi il software e gli algoritmi che, in sinergia, contribuiscono a tradurre immagini in nuvole di punti , distribuiranno all’interno di una area di distribuzione che avrà’ sulla sua posizione mediana la maggiore concentrazione di punti.
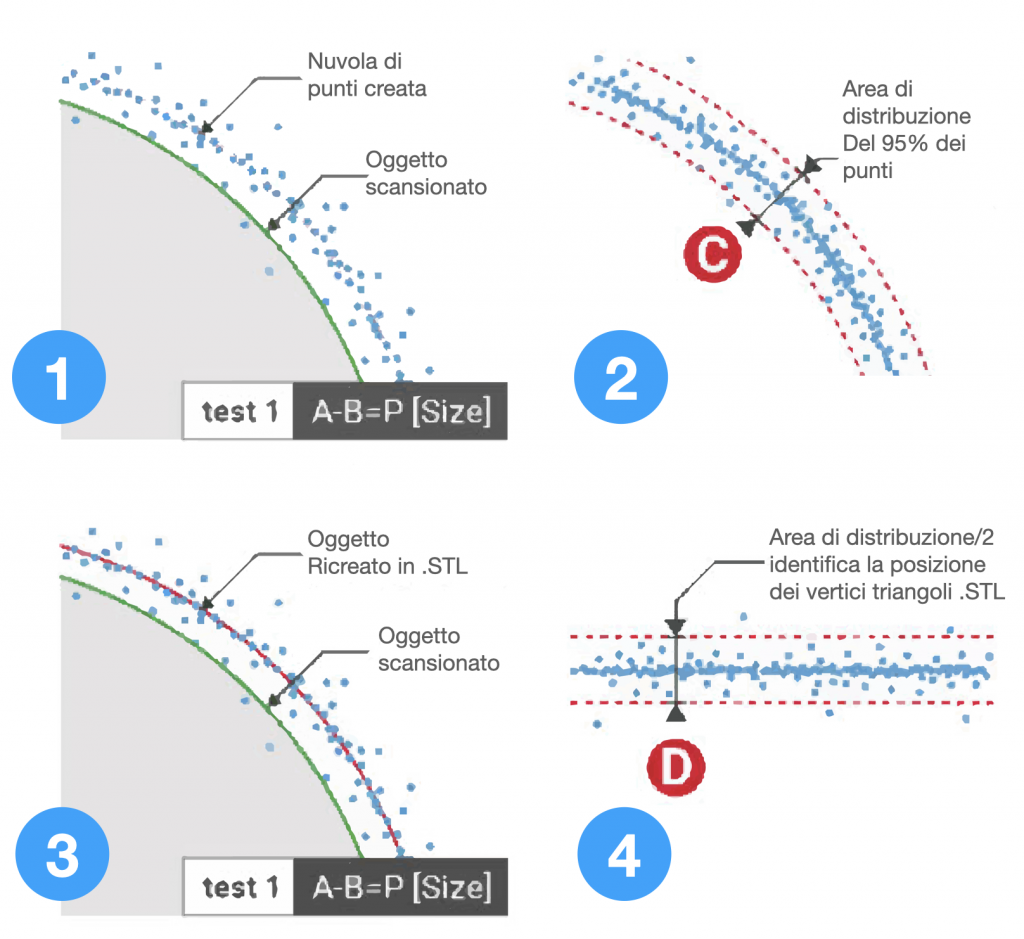
Circa il 95% dei punti si troverà’ all’interno di questa area, le coordinate piu’ esterne vengono interpretati come errori ed esclusi dai calcoli successivi.
Questo processo di esclusione del rumore si chiama Decimazione, maggiore è la decimazione piu’ prossimi saremo alla linea mediana che creerà la superficie del nostro futuro file STL.
La decimazione è controllata da un algoritmo che puo’ essere guidato con criteri differenti a seconda del produttore del software; questo processo è fondamentale per il buon risultato dei successivi file generati dalla nuvola di punti.
L’insieme di coordinate restanti dopo la decimazione andra’ a ricalcare come una seconda pelle il reale volume dell’oggetto scansionato.
Quindi sovrasterà l’oggetto, lasciano un piccolo spazio vuoto causato dai fenomeni luminosi spiegati precedentemente.
Un errore comune nei laboratori e negli studi dentistici che acquisiscono tramite scansione intraorale, è quello di ripassare su aree parzialmente acquisite o non perfetta nel tentativo di estrarre maggiori dati o informazioni anatomiche.
Questo comporta un ulteriore aumento dimensionale e quantitativo della nuvola che arricchendosi di nuove coordinate e informazioni andando ad aumentare anche i punti delle aree periferiche, questo porterà all’accettazione, da parte degli algoritmi di selezione e filtraggio , di punti generati da rumore elettrico, elettronico o riflessi luminosi e quindi ad allontanare la linea mediana dalla posizione reale dell’oggetto.
Questo eccesso di dati andra’ a creare un ulteriore deformazione della superficie con dei micro rilievi, un effetto buccia di arancia sull’oggetto ricostruito sulla base della nuvola di punti generata dalla sommatoria di piu’ pelli, di piu’ passate di scansioni, di un sovrapporsi di informazioni.
 Software e algoritmi lavoreranno all’unisono nel trasformare dei punti posizionati spazialmente da coordinate XYZ in una superficie semplificata formata da triangoli con i vertici vincolati da altrettante coordinate spaziali.
Software e algoritmi lavoreranno all’unisono nel trasformare dei punti posizionati spazialmente da coordinate XYZ in una superficie semplificata formata da triangoli con i vertici vincolati da altrettante coordinate spaziali.
Vertici sul quale isisteranno piu’ triangoli, 2,3,4,10 triangoli .. in base alla densita degli stessi che gli algorittmi hanno deciso di creare, infatti i moderni software di ricostruzione in STL andranno a infittire o ridurre la quantità e le dimensione di triangoli in base alla complessita’ dell’area da ricostruire: Aree piane o con curve lunghe e morbide avranno triangoli molto grandi e quindi in minor numero, aree complesse come spigoli o curve strette avranno triangoli molto fitti e di dimensioni ridotte.
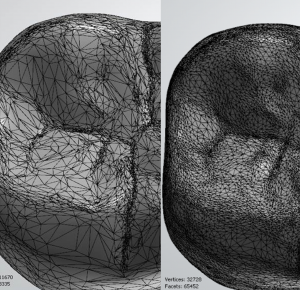 Questa differenziazione del numero e nella dimensione dei triangoli, partendo dalla risoluzione nativa della telecamera di acquisizione, adrà ad alleggerire il file STL in modo intelligente: un bordo di chiusura meriterà piu’ dettaglio di una parete verticale di un moncone.
Questa differenziazione del numero e nella dimensione dei triangoli, partendo dalla risoluzione nativa della telecamera di acquisizione, adrà ad alleggerire il file STL in modo intelligente: un bordo di chiusura meriterà piu’ dettaglio di una parete verticale di un moncone.
Telecamere con risoluzioni differenti , 1,2 mega pixel, 2,5 megapixel o addirittura 5 megapixel restituiranno reticoli completamente differenti tra loro come densita’ di triangoli , ma intelligentemente alleggeriti nelle aree di minore necessita’ di dettaglio.
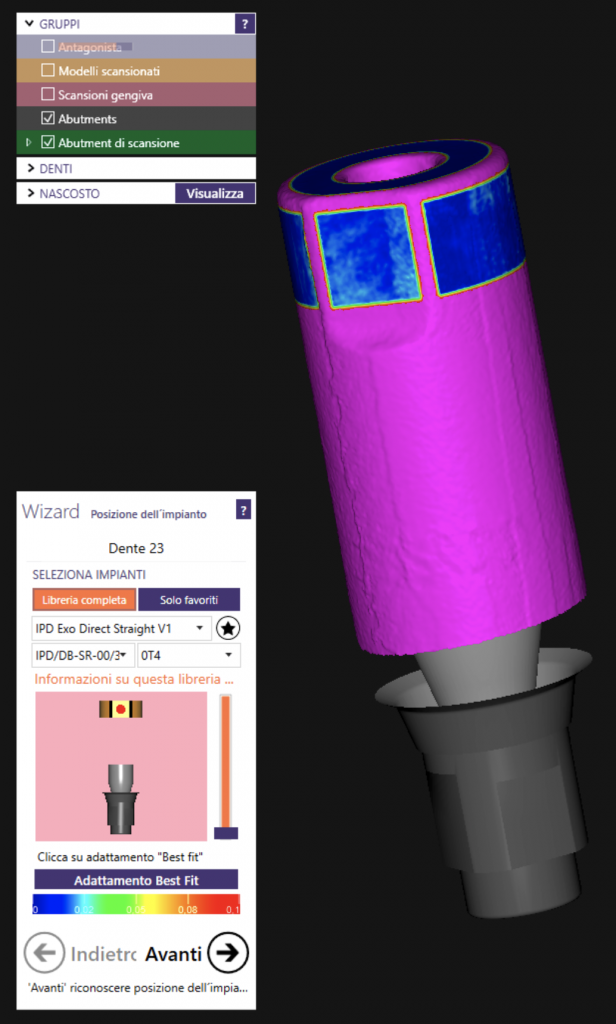
Adesso cerchiamo di usare le informazioni che abbiamo acquisito nelle slide precedenti e usarle per comprendere meglio gli scanbody su impianti.
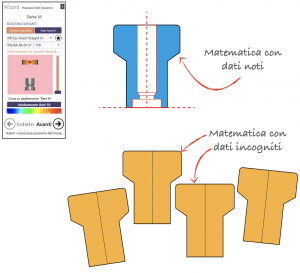 Una volta acquisito tramite scansione il nostro scanbody e importato in CAD, andremo a confrontarlo con la sua matematica gemella presente in libreria, i due file saranno simili nelle forme, ma non identici nelle dimensioni.
Una volta acquisito tramite scansione il nostro scanbody e importato in CAD, andremo a confrontarlo con la sua matematica gemella presente in libreria, i due file saranno simili nelle forme, ma non identici nelle dimensioni.
Analizziamo le informazioni che questi sue file trasciano con se, partiamo dal file di libreria:
Questo file si porta dietro una serie di dati fondamentali, delle origini , XYZ zero, e un asse, questi dati noti permettono di posizionare scanbody e matematica dell’impianto.
Il file proveniente dalla scansione avra’ delle origini, coordinate e assi legati al volume generale, moi otticamente riconosciamo gli oggetti ma per il software sono solo delle superfici prive di informazioni a noi utili per lavorare sugli impianti sottostanti, quindi verrà definita matematica incognita.
I nostri software di moderazione , nel mio caso uso prevalentemente Exocad ma la procedura è analoga per tutti i software, ci permetteranno di sovrapporre ma matematica con dati noti, il file di libreria, con la matematica incognita, la scansione.
Il calcolo che l’algoritmo effettua per questa sovrapposizione si chiama ICP, Iterative Closest Point , che consiste in 3 sotto calcoli differenti, rotazionale, avvicinamento e best fit “migliora la posizione finale”.
Tutto questo fenomeno di roto-translazione avviene quando clicchiamo sul pulsante “Adattamento BestFit”
 Gli algoritmi hanno al loro interno dei sistemi di protezione e riduzione del peso, iniziano con una area di comparazione per la rotazione, se il calcolo restituisce un errore, una impossibilita’ di ruotare gli oggetti andrea’ ad aumentare i suoi parametri fino a quando il sistema non gli permetta di iniziare al rotazione, effettuata una prima rotazione grossolana vera’ ripetuto il tutto con i parametri piu’ stringenti.
Gli algoritmi hanno al loro interno dei sistemi di protezione e riduzione del peso, iniziano con una area di comparazione per la rotazione, se il calcolo restituisce un errore, una impossibilita’ di ruotare gli oggetti andrea’ ad aumentare i suoi parametri fino a quando il sistema non gli permetta di iniziare al rotazione, effettuata una prima rotazione grossolana vera’ ripetuto il tutto con i parametri piu’ stringenti.
Quando il calcolo restituisce un ok il sistema ripeterà il calcolo con valori ancora piu’ stringenti se restituisse errore si tornerebbe ad allargare le maglie dei valori.. e cosi via.. fino ad un limite di “N” volte.
Finita la rotazione di passa alle translazioni, stesso concetto di soglie di errore sempre piu’ stringenti, anche il posizionamento finale sfrutterà’ i medesimi concetti di prova.. migliora .. prova e migliora.. non riesci? Torni in dietro e riprovi.. e cosi via..
Io vi sto’ cercando si semplificare al massimo il concetto che sta’ dietro a questi algoritmi, perdonatemi se a volte cado nel troppo banale o semplice ma non tutti conoscono i meccanismi di funzionamento di un ICP.
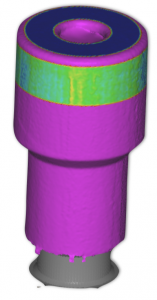 Ora tutti gli algoritmi hanno finito i calcoli e hanno sovrapposto le due matematiche , quella nota e quella incognita.. ma ci accorgiamo che si sono sovrapposte due matematiche con la stessa forma ma dimensioni non identiche: la matematica nota è piu’ grande di quella incognita’ ( concetto affrontato all’inizio del post) tra i due file c’è dello spazio ed Exocad ci evidenzia questo spazio con una scala colore che va’ dal blu ( spazio nullo) al rosso ( un decimo di millimetro di spazio).
Ora tutti gli algoritmi hanno finito i calcoli e hanno sovrapposto le due matematiche , quella nota e quella incognita.. ma ci accorgiamo che si sono sovrapposte due matematiche con la stessa forma ma dimensioni non identiche: la matematica nota è piu’ grande di quella incognita’ ( concetto affrontato all’inizio del post) tra i due file c’è dello spazio ed Exocad ci evidenzia questo spazio con una scala colore che va’ dal blu ( spazio nullo) al rosso ( un decimo di millimetro di spazio).
Ora le cose si fanno piu’ complesse.. dovete cercare di seguirmi nel ragionamento.
Vedete che la parte occlusale dello scanbody è blu e la parte periferica cilindrica è verdolina? Perche se lo scanbody , la matematica incognita, è cresciuta per colpa della luce , sara’ cresciuta in tutte le direzioni! Non solo orizzontalmente !!
Quindi cosa succede al software e all’algoritmo?
La matematica incognita è cresciuta in tutte le direzioni.. ma se sulla parte cilindrica l’algoritmo di “BestFit” ha dovuto cercare una media di posizione perché il calcolo continuava a rispondere errore sulla parte occlusale è riuscito a sovrapporre due piani , che saranno traslati per colpa della crescita ma sempre due piani sono e il calcolo ha restituito un OK .. sono allineati..

Andiamo a vedere che tipo di conseguenze comporta questo accoppiamento tra matematiche note e incognite con dimensioni non sovrapponibili:
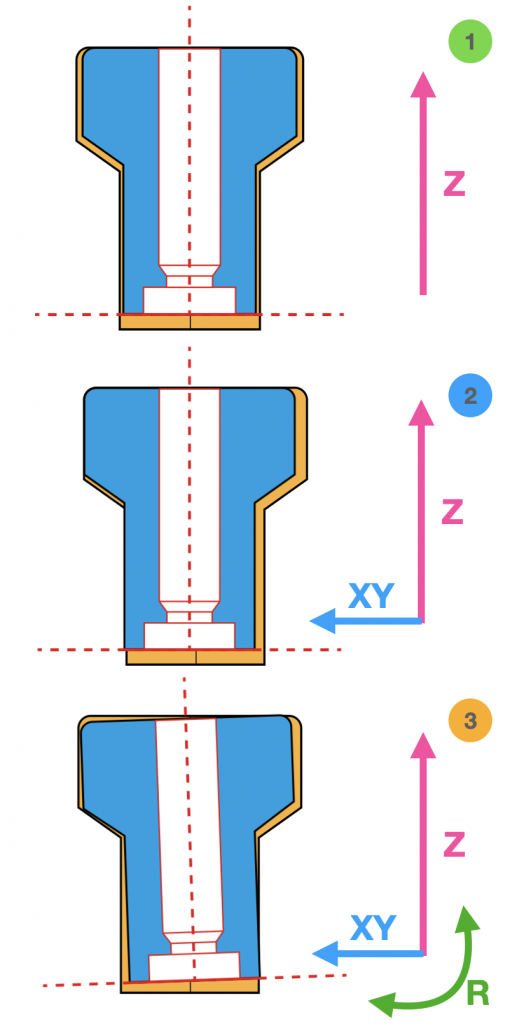 Nel primo caso abbiamo un accoppiamento perfetto in testa, occlusalmente e una distribuzione intelligente dell’errore sulla parte cilindra. Di conseguenza avremmo un errore nel posizionare la matematica della connessione implantare verso l’alto, in Z .. l’asse implantare è corretto ma abbiamo appena fatto una estrusione verso l’alto della connessione e quindi del bordo ci chiusura.
Nel primo caso abbiamo un accoppiamento perfetto in testa, occlusalmente e una distribuzione intelligente dell’errore sulla parte cilindra. Di conseguenza avremmo un errore nel posizionare la matematica della connessione implantare verso l’alto, in Z .. l’asse implantare è corretto ma abbiamo appena fatto una estrusione verso l’alto della connessione e quindi del bordo ci chiusura.
Il secondo caso invece, pur mantenendo un asse implantare corretto il calcolo ha sovrapposto le teste ma non avrà’ distribuito in modo intelligente l’errore sulla parte cilindrica verticale.
Questo errore è tipico degli scanbody che presentano una faccia piatta laterale di dimensioni importanti. La scala colore si Exocad evidenzierà’ una superficie occlusale blu e la parete piatta laterale blu mentre la restante parte cilindrica avrà’ un colore non uniforme dovuto al disallineamente di porzioni di archi.
La nostra connessione implantare avra’ subito uno spostamento verso l’alto in Z e una traslazione laterale XY
Il terzo caso, il peggiore di tutti è quando per colpa di questo sovradimensionamento della matematica incognita e una acquisizione parziale o incompleta dell’oggetto , lo scanbody , tutti i calcoli avranno restituito una serie importante di errori ma non sufficienti da invalidare tutto il calcolo, quindi avremo la non sovrapposizione dei piani occlusali, le teste dei file, una non sovrapposizione della faccia piatta laterale con un conseguente scivolamento della connessione implantare verso l’alto in Z, laterale in XY e una rotazione degli assi implantari. Se un operatore poco esperto conferma al software di accettare questo posizionamento tutti i piani di chiusura e assi saranno sbagliati e differenti dalla posizione reale degli impianti in bocca al paziente.
.. Insomma.. un disastro annunciato..
Cerchiamo ora di analizzare tutti questi dati, queste informazioni; vediamo di capire qual’è la soluzione che abbiamo adottato e perchè.
Facciamo un salto in dietro, abbiamo detto che la scansione ottica è influenzata da fattori ambientali, la luce presente nell’ambiente, e che la nuvola di punti sovradimensiona gli oggetti creando i successivi errori di sovrapposizione durante il calcolo di ICP.
Questo fenomeno di ingrandimento non è costante, varia a seconda dello scanner che usate e a seconda della luce presente nell’ambiente.
Il mio scanner DOF , con sportello per ridurre la luminosità’ ambientale ingrandisce tutti gli scanbody di 45-50 micron, altri scanner ingrandiscono di meno o di piu’..
Non dobbiamo preoccuparci di quando ingrandiscono, 20 micron non è meglio di 50.. l’importante è che sia costante nel suo ingrandimento , che la scansione fatta al mattino sia ingrandita quando quella fatta all’ora di pranzo o alla sera all nove.. se l’errore è costante si potrà fare una tara, e quindi togliere l’errore.. vediamo come..
Le librerie IPD ProCam permettono di misurare l’ingrandimento dello scanabutment tramite l’utilizzo di un file T0 che ah l’esatta dimensione dell’oggetto scansionato.
Una volta misurato l’ingrandimento che la matematica incognita ha subito potremmo richiamare dalla libreria un file che è stato ingrandito nella stessa proporzione, questi file vanno dai 10 ai 60 micron di ingrandimento in tutte le direzioni , xy e z ..
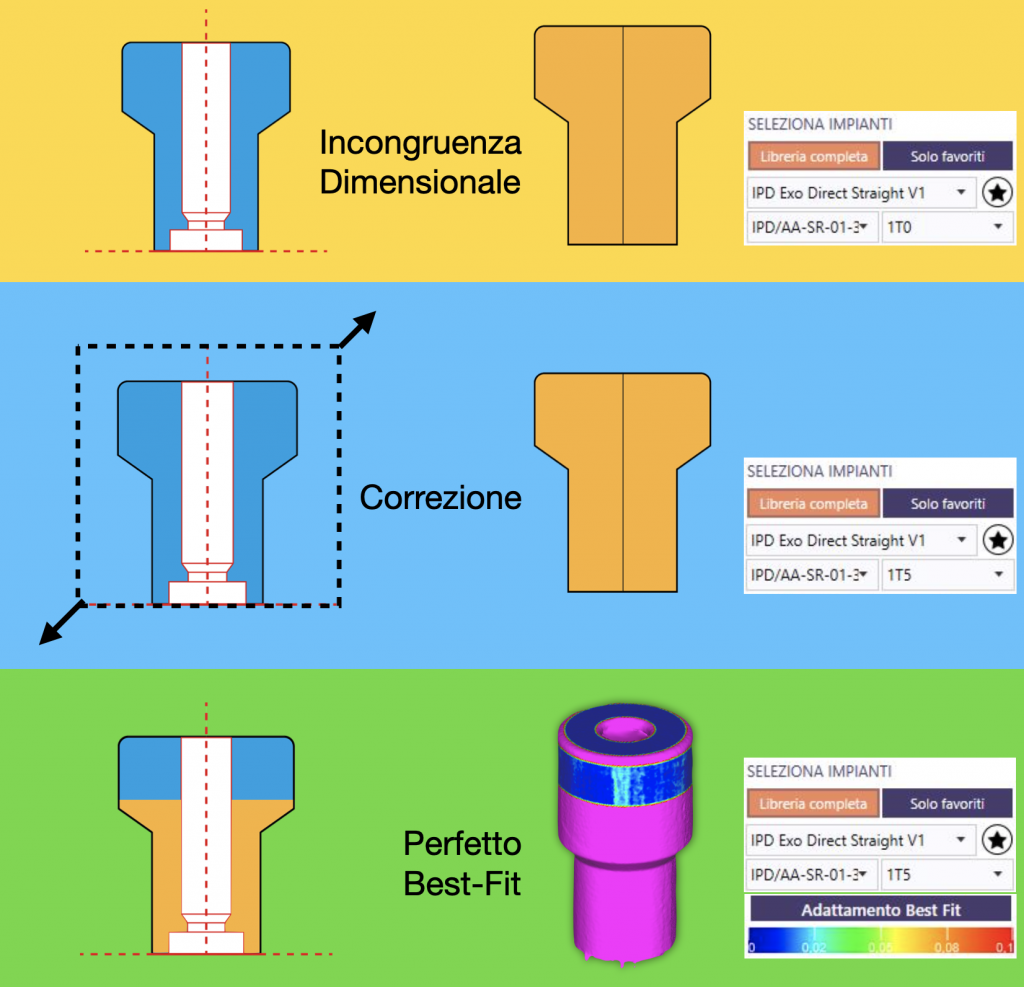
Quando andremo a sovrapporre ma matematica nota dalla libreria e quella incognita proveniente dalla scansione il cad ci restituirà’ un colore blu su tutta l’area di sovrapposizione dei due file.
E’ importante non solo permettere di fare la tara allo scanner con l’uso di file progressivamente maggiorati ma anche di preparare un file e un oggetto ottimizzati per la scansione e per la sovrapposizione.
Lo scanbody fisico con una geometria elementare, cilindrica è facilmente leggibile dagli scanner, geometrie piu’ complesse richiedono maggiore sforzo nella lettura e quindi maggiori errori.
Il file che viene sovrapposto, la matematica nota ha una dimensione occlusale estesa al massimo della capacita’ di utilizzo per il calcolo, gli spigoli sono sempre fonte certa di errori, e lui ne è privo, il foro della vite pure è fonte di errori e cerchiamo di stare lontano da esso. La parte cilindrica verticale è molto piu’ piccola rispetto alla parte fisica dell scanbody..
Il perche??
Tu prova ad immaginare la quantità’ di triangoli presenti su un ascansione come quelle fatte con scanner in UHD o solo in full HD.. il software non puo’ e non vuole prendere in considerazione tutti i punti o vertici dei triangoli che trova , non finirebbe piu’ il calcolo quindi deve prendere uno si e x punti no.. quindi noi vogliamo che il calcolo sia concentrato nelle aree piu’ utili, il piano occlusale che identifica la planaria’ tra la connessione implantare reale e quella virtuale e vincolare in z perfettamente i file ed evitare inoltre rotazioni degli assi, e la primissima parte cilindrica che ci permette in una zona di messa a fuoco ideale di identificare il vettore, della matematica incognita e sovrapporlo perfettamente con la matematica nota, quindi evitare scivolamenti laterai in XY.
 Il concetto , simile ma non identico, si applica su tutti gli scanbody IPD ProCam con ingaggio.
Il concetto , simile ma non identico, si applica su tutti gli scanbody IPD ProCam con ingaggio.
Dovendo identificare la posizione di un esagono implantare serve inserire sul corpo di scansione una faccia piatta.
Abbiamo visto prima come le facce piatte sono fonte di errore, errore 2 ed errore 3, quindi serve una gestione molto accurate della forma del marker da scansione.
Conoscendo il processo di accoppiamento e gli algoritmi che ne determinano il funzionamento abbiamo lavorato sulle dimensioni delle facce piatte, restando al di sotto di una soglia ben precisa, inserendo quindi una faccia piatta di dimensione ridotta possiamo ingannare l’algoritmo e fargli orientare il file come richiesto ma dando un peso maggiore alla parte cilindirca in modo che la faccia piatta non attragga a se l’intero file.
Questo “inganno” è fondamentale e calibrato molto finemente, una faccia con dimensione di poco superiore avrebbe innescato il trascinamento laterale del file e degli assi implantari virtuali.
In conclusione:
Quello che noi con le librerie IPD ProCam vogliamo ottenere è un trasferimento delle informazioni da matematiche note ad incognite che siano il piu’ possibile perfette.
Noi cerchiamo il perfetto accoppiamento, il colore blu sempre e in tutte le aree di sovrapposizione. Di errori nelle nostre procedure di laboratorio ne abbiamo molte ma se riusciamo a ridurle eliminando fonti di incertezza dovute ai prodotti usati è sicuramente meglio.
Riduciamo l’errore il piu’ possibile, iniziamo ad usare dei prodotti che ci permettano di farlo realmente e non solo sulla carta stampata che ci portano i rappresentanti.
Testi di Francesco Biaggini
CEO IPD/AbutmentCompatibili.com
Vuoi maggiori informazioni su IPD ProCam?





